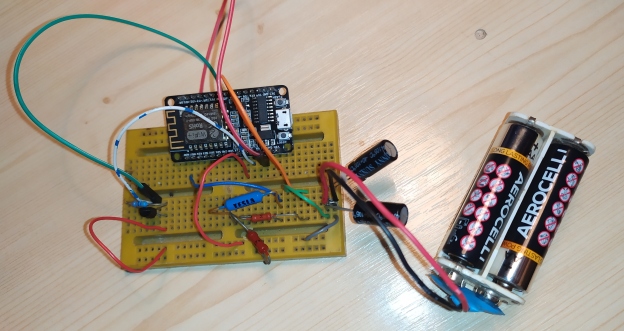
Měřič spotřeby do 32 V a 2 A s rozlišením až 0.1 mA se dá postavit jen ze dvou modulů – ESP32 s integrovaným OLED displejem, a breakout destičkou s INA219.
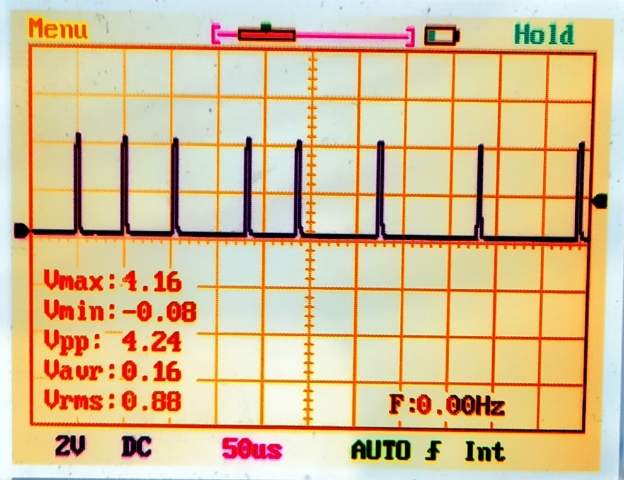
Má ale cenu si ho stavět, když se dá koupit za pár dolarů hotový? Myslím, že ano. Například proto, že se nechci omezovat jen na napájení přes USB. Nebo proto, že nechci, aby se měřící obvod napájel z měřeného okruhu (což se ale dá také koupit hotové). Nebo proto, že chci měřit low-power zařízení, která většinu času nedělají nic a jen jednou za dlouhou dobu chvíli vysílají – a zde většina zařízení dostupných za rozumnou cenu již nepomůže. A připojení na internet, to už jsem zmiňoval?
Celý příspěvek →